Abstract
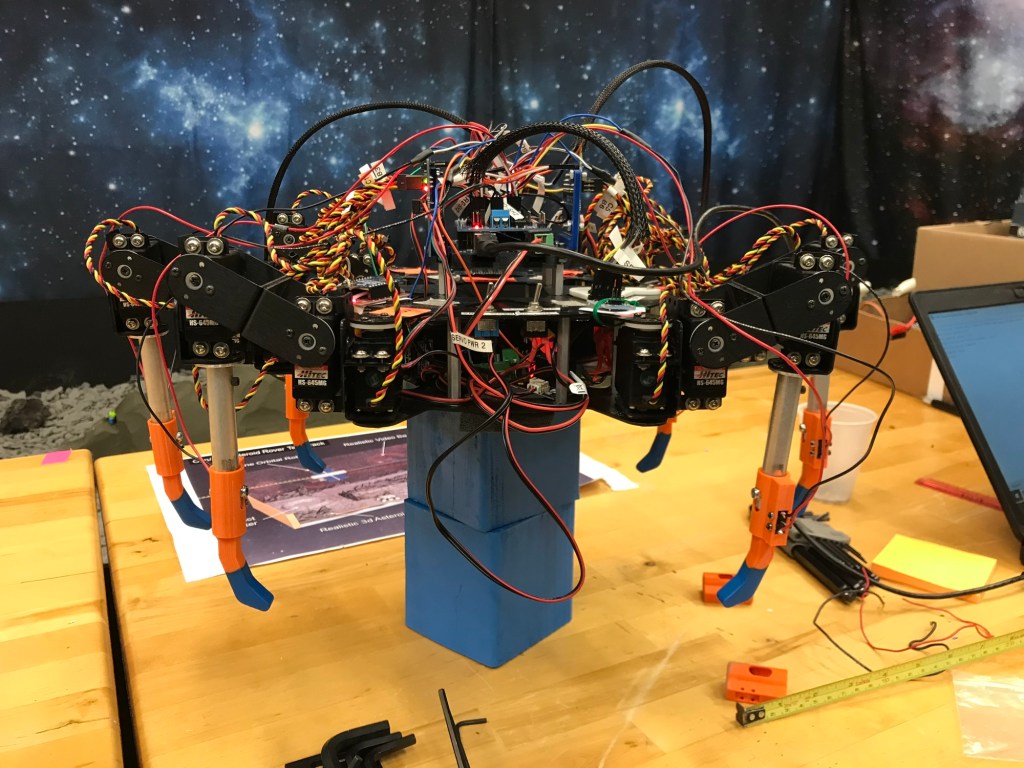
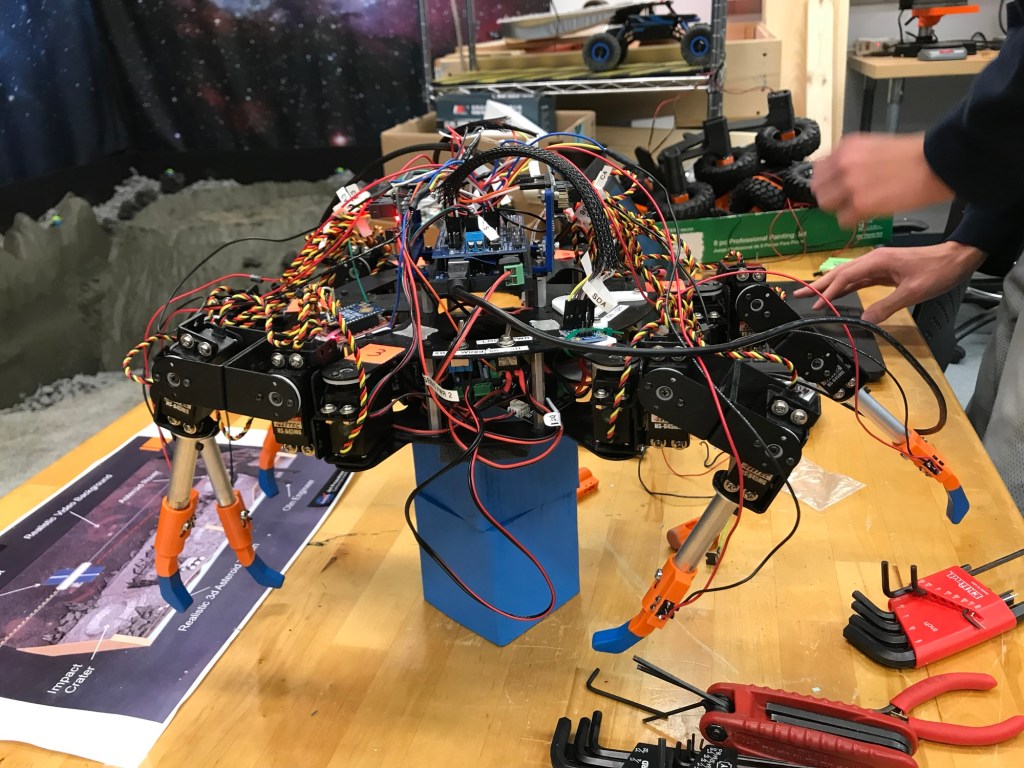
The hooves of goats and other ruminants are uniquely structured to adapt to rough terrain. Their hooves possess a hard outer shell and a soft interior that allow them to both conform to uneven surfaces and hook onto prominent features. Artificial feet for a hexapedal robot have been designed using this principle in order to improve the robot’s ability to traverse unstructured environments, such as those found on a rocky planet or asteroid, as well as in earth-based environments such as rubble, caves, and mountainous regions. The feet were manufactured using a combination of 3D printing and polyurethane casting techniques and attached to a commercially available hexapedal robot. The robot was programmed with a terrain-adaptive gait and proved capable of traversing a variety of uneven surfaces and inclines. This development of more capable feet allows legged robots to operate in a wider range of environments and expands their possible applications.

Leave a comment